quarta-feira, abril 25, 2007
Vídeo do Robosapien
Ai esta o primeiro vídeo do Robosapien.
Nas próximas postagens vou estar detalhando a funcionamento do robô (atuadores e sensores).
Marcadores: robô, robosapien
Robosapien R1

Com a finalização da 1a fase do projeto do robô R10D10, novas idéias já começam a surgir!
Uma delas, que tenho já faz algum tempo, é realizar um upgrade em um robô de linha. Mas específico: realizar um processo de "hackeamento" de um Robosapien.
E o dia chegou !!! Na verdade o que chegou foi um Robosapien R1 novinho.

A idéia é adicionar um novo microcontrolador e novos sensores no Robosapien. Também alguma integração com o PC via wireless para permitir o controle a distância.

Assim que este projeto evoluir, postarei novas notícias.
Marcadores: automação, computação, robô, robosapien
domingo, agosto 27, 2006
R10D10 em ação

Neste final de semana o robô R10D10 participou do Experience Nova Graduação da Unisinos, representando o curso de Engenharia da Computação.
Para o evento o robô foi equipado com um link de vídeo de 2.4GHz ligado diretamente aos telões.
O robô passeou pelo evento comandado tanto diretamente através de um joypad, como remotamente através de uma rede sem fio (WiFi ad hoc). Nas imagens abaixo podemos ver o robô e uma captura de tela do sistema de controle WiFi.

R10D10 durante o evento
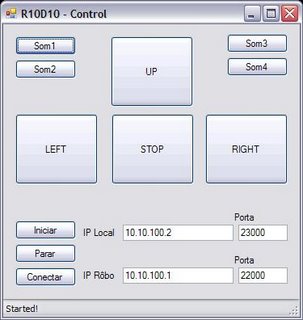 Tela do sistema de controle WiFi
Tela do sistema de controle WiFi
A seguir mais um vídeo do R10D10, desta vez em movimento, sendo controlado através um Tablet PC pela rede WiFi.
sábado, agosto 19, 2006
Vídeo R10D10 #01
O vídeo mostra a parte externa e interna do robô, ainda em fase de construção.
Internamente é possível ver a instalação da câmera de vídeo analógica, upgrade mais recente ao projeto.
quarta-feira, maio 31, 2006
Globaltech
O R10D10 participou no estande da Unisinos sobre robótica móvel e realidade aumentada, atraindo a atenção do público.

A versão para a Globaltech foi equipada com os seguintes opcionais:
- Display LCD gráfico 128x64
- Webcam
- Tablet PC com Wifi para teleoperação
A idéia é que o LCD se torne item de série na versão final.
segunda-feira, maio 15, 2006
Pernas

Estou colocando a imagem do robô logo após as pernas terem sido instaladas.
Os motores ainda não foram colocados nas pernas traseiras, mas essa é a próxima etapa. Após a instalação dos motores ja será possível realizar os primeiros testes de mobilidade.
Na imagem também é possível ver a fuselagem aberta na parte traseira do robô, desta forma possibilitando o acesso à parte interna.
Toda a estrutura, sem nenhum componente ou baterias, esta pesando cerca de 10Kg !
domingo, maio 07, 2006
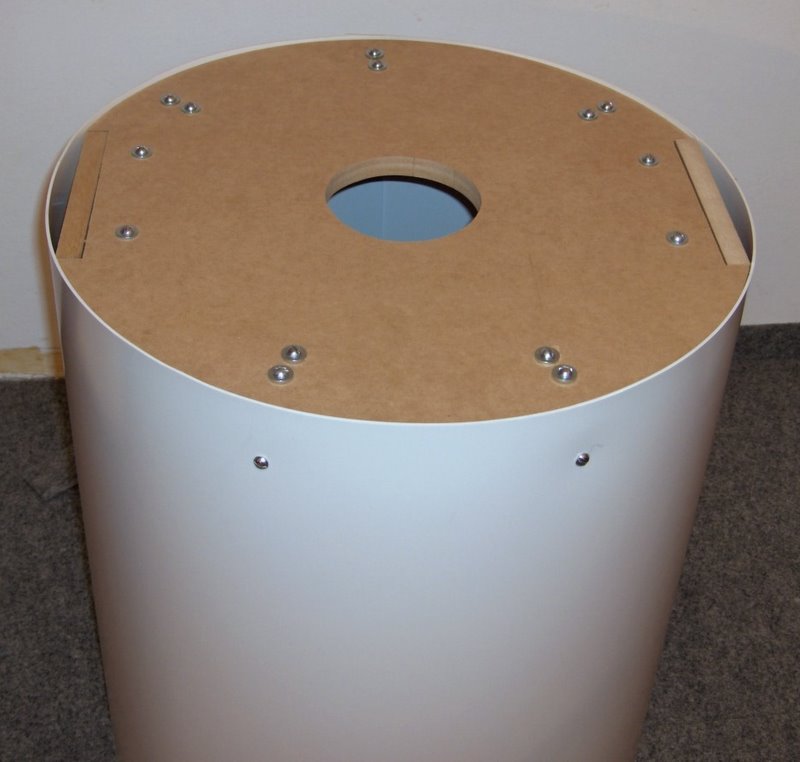
A Fuselagem
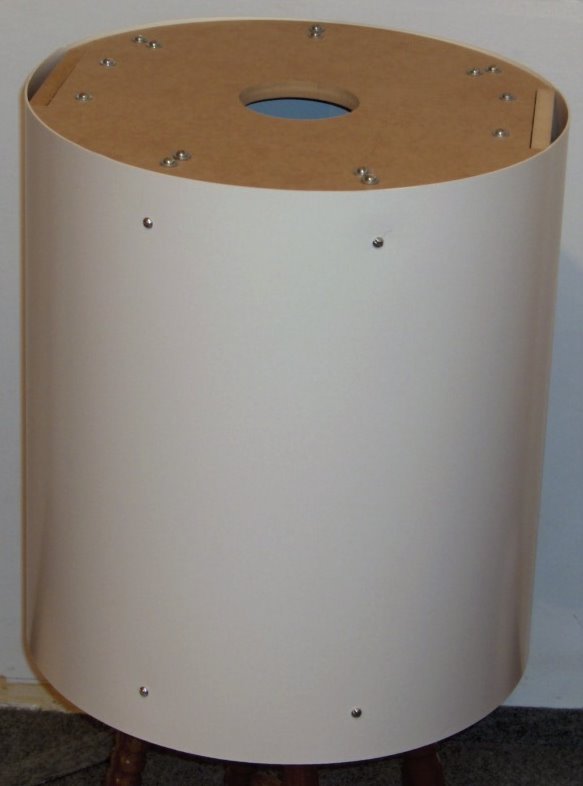
Após reforçar a estrutura com pequenas chapas de aço e parafusos, foi possível adicionar a fuselagem do robô.
O material utilizado para a fuselagem foi o poliestireno de alto impacto (HIPS), adquirido em chapas de 2x1 m.
Uma única chapa envolve toda estrutura do robô, e 4 parafusos traseiros permitem o acesso a parte interna.
Todos os detalhes serão adicionados utilizando-se o poliestireno, desta forma escondendo a estrutura de MDF e dando ao robô um look mais "tecnológico".

visão superior da estrutura com a fuselagem
segunda-feira, maio 01, 2006
Acionando os Motores
Nesta fase de testes as coisas costumam "explodir" as vezes ! Portando bolei um circuito simples para acionar os motores usando o velho e bom relé.

Para a proteção é importante o diodo. Para quem mesmo assim ainda quiser um pouco mais de proteção, sugiro um optoacoplador.
Assim ficaram os circuitos montados (dois, um para cada motor):

sábado, abril 29, 2006
O Esqueleto

Depois de um bom tempo sem colocar as mãos no projeto, construí utilizando MDF o esqueleto interno do robô.
O esqueleto tem 50cm de altura e 45cm de largura. Na foto é possível ver também os dois braços onde serão instalados os motores.
Ainda é necessário instalar alguns reforços estruturais e o apoio para o rodízio dianteiro.
Optei em utilizar duas baterias de 12V 7A para conseguir distribuir melhor o peso.
Na parte eletrônica iniciei a montagem dos circuitos para o acionamento dos motores (na primeira versão vai ser bem simples, com relés - é possível ver uma parte na foto).
quarta-feira, janeiro 11, 2006
Os Motores
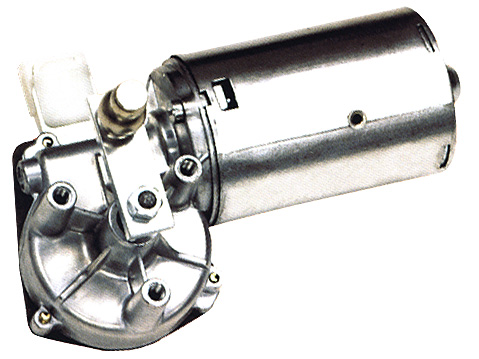
Consegui o primeiro par de motores!
São dois motores Bosch CHP de 12V.
Segundo as especificações da Bosch:
- torque máximo de 14Nm (mais ou menos 1.5K*m)
- rotações: 75 RPM
- Peso: 1100 gramas
- Consumo Nominal: 3A
Bom, 3Amp já é bastante! Depois de olhar com cuidado a curva de desempenho verifiquei a realidade. Com 3Amp:
- torque: 0.2Nm
- rotações: 40 RPM

Se eu quiser um torque significativo, digamos 10Nm, vou precisar fornecer 12Amp !!!
PS: não posso esquecer de comprar MUITOS fusíveis.
Estou vendo que vou ter muito trabalho para construir o circuito controlador dos motores, que por sinal já esta sendo projetado no EAGLE. Estou projetando um H-Bridge utilizando MOSFETs.
Nas imagens é possível ver os motores, o par de rodas, e o rodízio.

quarta-feira, janeiro 04, 2006
Escolhendo as ferramentas
Bom, alguns são indispensáveis, mas ao mesmo tempo inviáveis – é o caso do osciloscópio (muito caro!).
A fase atual é de prototipagem, então estou montando uma bancada com uma série de ferramentas que irão me ajudar neste processo.

Esquerda para direita: morsa, ferro de solda,
multímetro, protoboard, HP48
Nas fotos vocês podem ver algumas delas. As principais são:
- Ferro de Solda
- Multímetro
- Protoboard
Óbvio que a boa e velha HP48 sempre fornece uma boa ajuda.
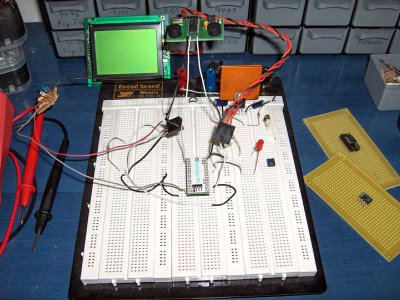
Protoboard com o micro controlador M8 e alguns experimentos
Na protoboard eu tenho montado uma série de testes para um LCD gráfico, sonar, encoder ótico, e algumas experiências com o conversor AD. Eu estou utilizando o micro controlador da Tato, Basic Step M8 (Atmel Mega8), que é um bom MCU para iniciantes.
Uma ferramenta que quebra o maior galho é a morsa (é a terceira mão).
Colocando a idéia no papel

Tentando consolidar minhas idéias sobre este projeto, vou escrever um pouco sobre ele.
O principal objetivo na construção deste robô é que ele deve ser grande! Diversos desafios emergem em um projeto de um robô de maior porte, principalmente no que diz respeito ao controle dos motores.
Será um robô móvel, com tração diferencial (2 motores).
Tenho em mente um robô de cerca de 1 metro de altura, espaço e capacidade de carga suficiente para carregar internamente um computador (notebook) e uma série de sensores (câmera de vídeo, sonar, bumpers, etc).
Um problema é o custo. Para tentar evitar um custo muito elevado pretendo realizar algumas visitas a ferros-velhos para garimpar alguns componentes (com certeza documentarei estas visitas aqui).
Em formato, o robô terá uma forte inspiração no famoso R2D2.
terça-feira, janeiro 03, 2006
O embrião
Cada etapa da construção será colocada aqui em detalhes.
Neste momento o projeto nem foi para o papel ainda, mas as idéias estão se formando e a seqüência de criação já esta clara para mim.
Aguardem que nos próximos posts serão apresentados mais detalhes.
![]()

{kind=link}